Abstract
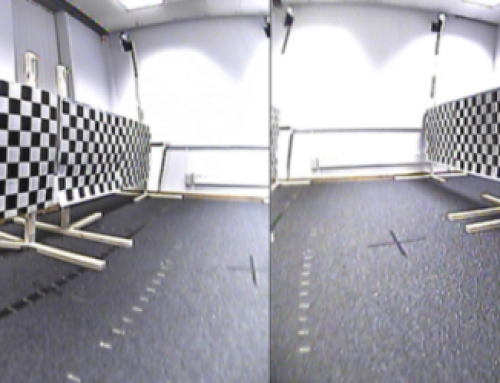
Flying insects are capable of a wide-range of flight and cognitive behaviours which are not currently understood. The replication of these capabilities is of interest to miniaturized robotics, because they share similar size, weight, and energy constraints. Currently, embodiment of insect behaviour is primarily done on ground robots which utilize simplistic sensors and have different constraints to flying insects. This limits how much progress can be made on understanding how biological systems fundamentally work. To address this gap, we have developed an inexpensive robotic solution in the form of a quadcopter aptly named BeeBot. Our work shows that BeeBot can support the necessary payload to replicate the sensing capabilities which are vital to bees’ flight navigation, including chemical sensing and a wide visual field-of-view. BeeBot is controlled wirelessly in order to process this sensor data off-board; for example, in neural networks. Our results demonstrate the suitability of the proposed approach for further study of the development of navigation algorithms and of embodiment of insect cognition.
![]()
Resources
BeeBot is described in further detail in the following IJCNN paper:
Sabo C., Yavuz E., Cope A., Gurney K., Vasilaki E., Nowotny T., and Marshall J. A. R. (2017) An Inexpensive Flying Robot Design for Embodied Robotics Research. 2017 International Joint Conference on Neural Networks. Anchorage, Alaska, May 14-19.